
Wie lässt sich ein Elektroauto energieeffizient fahren? Dies ist eine konkrete Version der abstrakten Frage, wie man ein dynamisches System optimal steuert. In dieser Profillinie lernen Sie breit gefächerte mathematische Methoden der Optimierung und Systemtheorie kennen, die auf die Beantwortung solcher Fragen abzielen. Insbesondere erwerben Sie Kenntnisse, die in einer Welt von lernenden dynamischen Systemen vielfältige Anwendungen finden.
Beispielhafter Studienverlaufsplan
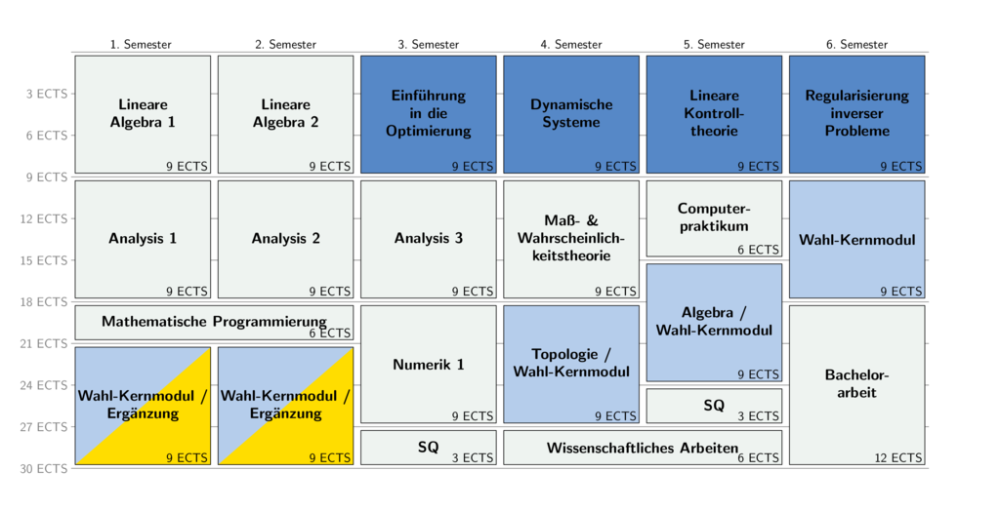
Illustration der Module und Erweiterungen
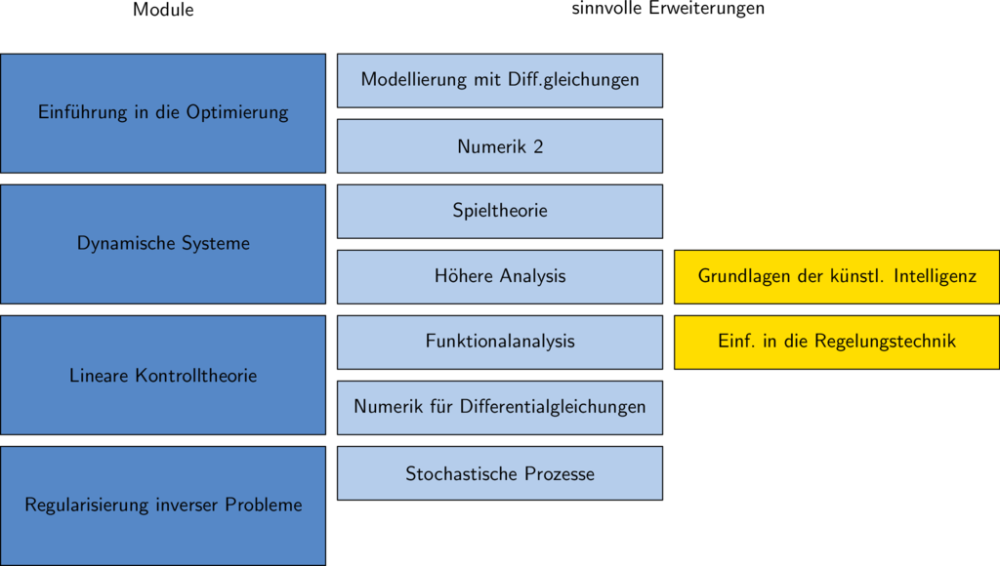
- Einführung in die Optimierung
- Dynamische Systeme
- Lineare Kontrolltheorie
- Regularisierung inverser Probleme
Die Angebotssemester der Module können von der Graphik abweichen.
- Analysis 1
- Analysis 2
- Analysis 3
- Lineare Algebra 1
- Lineare Algebra 2
Die Module der Profillinien werden einmal jährlich angeboten mit unterschiedlicher Ausrichtung (Kontrolltheorie bzw. inverse Probleme).
- Grundlagen der Künstlichen Intelligenz
- Einführung in die Regelungstechnik für Mathematiker und Verfahrenstechniker
Darüberhinaus sind folgende Module als vorgezogene Mastermodule gegen Ende des B.Sc. sinnvoll:
- Model Predictive Control
- Stochastische Prozesse und Modellierung
- Nichtlineare Dynamik
Mathematik-Module
-
Robust Control
-
Linear Matrix Inequalities in Control
-
Moderne Methoden der Optimierung
-
Grundlagen inverser Probleme
Ergänzungsmodule
- Optimal Control
-
Nonlinear Control
-
Convex Optimization
-
Diskrete Optimierung
-
Graphentheorie
-
Modellierung und Identifikation dynamischer Systeme
-
Theoretical and Methodological Foundations of Autonomous Systems
-
Reinforcement Learning
-
Introduction to Adaptive Control
-
Networked Control Systems
Darüberhinaus sind folgende Erweiterungen sinnvoll:
-
Stochastische Prozesse II
-
Statistische Lerntheorie
-
Stochastische Differentialgleichungen
-
Unendlich-Dimensionale Dynamische Systeme
-
Nichtlineare partielle Differentialgleichungen
-
Spektraltheorie
-
Funktionalanalysis 2
-
Stochastische Analysis
-
Computational Dynamics for Robotics
-
Dynamik Nichtglatter Systeme
-
Nichtglatte Dynamik
-
Machine Learning
-
Advanced Mathematics for Signal and Information Processing
-
Optimalsteuerung in der Luft- und Raumfahrttechnik